TRABAJO DE
INVESTIGACION
(Iberotec 1TTE)
(Iberotec 1TTE)
- INTRODUCCION
- TELEMATICA
- CONCEPTO DE TELEMATICA
- HISTORIA
- LA ROBOTICA
- EL CONCEPTO DE ROBOTICA
- HISTORIA DE LA ROBOTICA
- LA PREHISTORIA
- DESARROLLO HISTÓRICO
- EL MONJE CIBERNÉTICO
- EL PATO QUE EVACUABA
- LA MUÑECA ESCRIBANA
- PRIMERAS APROXIMACIONES
- UNA INDUSTRIA INCIPIENTE
- EL GRAN BOOM DEL IMPERIO
- ALGUNOS NOMBRES Y FECHAS
INTRODUCCION:
No hay solución posible. Cuando se habla de robótica con alguien, casi se puede ver en los ojos del interlocutor la imagen e C3PO hablando sin parar cuatrocientos idiomas a la vez y corriendo de un lado para otro delante o detrás del Jeda de turno.Aunque las películas y novelas de ciencias ficción han logrado que la robótica comience a interesar a una cantidad cada vez más numerosa de personas, por desgracia la robótica actual dista mucho de haber evolucionado hasta el punto que se nos mostraba en la trilogía de "La guerra de las galaxias”.
En este proyecto vamos a intentar dar un repaso a la situación actual de la robótica, así como a analizar los distintos componentes de un robot y los diferentes tipos de robot que se pueden encontrar en la actualidad.
TELEMATICA:
CONCEPTO DE TELEMATICA
Se puede definir a la Telemática como parte de una Ciencia, buscando brindar el desarrollo de las tecnologías que buscan el constante desarrollo en conjunto tanto de las Telecomunicaciones como de la Informática, brindando metodologías, procesos, técnicas y hasta servicios que pueden resultar útiles para ambas o su aplicación en conjunto.
Este concepto ha valido para la creación de una gran cantidad de tecnologías que permiten no solo realizar Telecomunicaciones entre usuarios de todas partes del mundo, sino también la comunicación de al menos dos ordenadores a través del servicio de Internet, a alta velocidad y compartiendo contenidos multimedia. Para ser considerada formalmente como ciencia debe tener un objeto de estudio, y es por ello que el de la Telemática es simplemente las Tecnologías de la Información y la Comunicación (conocidas también por su acrónimo, Tics) El concepto se introdujo a mediados de los años 70, en el momento en el que se buscaba planificar nuevas tecnologías en el que no solo las Comunicaciones debían ser actualizadas fuertemente, sino que debían ser pensadas también relacionadas estrictamente a los Ordenadores, teniendo este término origen francés, Télématique. Entonces, no solo debemos considerar que se analiza la Transmisión de Datos entre distintos equipos, sino que también se está teniendo en cuenta la comunicación a través de los mismos, teniendo en cuenta no solo el lado humano de los usuarios, sino también pasar a segundo plano a los equipos, que quedarán como el Medio por el cual se propaga el mensaje. Entre las distintas finalidades que tiene la Telemática, las que se destacan principalmente son las siguientes: Aplicación de Tecnologías de la Información y Comunicación (TIC) para la creación de distintos proyectos que busquen generar infraestructuras eficientes de Telecomunicación en distintas edificaciones, aplicables a empresas.

Elaborar un sustento fiable para futuros desarrolladores de estas tecnologías y aplicaciones, además de crear nuevas tecnologías que permitan suministrar equipos y otros sistemas de telecomunicación.
Gestionar la creación de Redes de Área Local (LAN), Redes de Área Metropolitana (MAN) y Redes de Área Amplia (WAN) con la aplicación de planificaciones y gestión de nuevas tecnologías.
Diseño de nuevas aplicaciones para sistemas, servicios correspondientes a las áreas de redes y medidas de seguridad que deriven en un desarrollo Rápido, Fiable y Seguro de las Telecomunicaciones entabladas.
Brindar las normativas necesarias que permitan homologar y rectificar los criterios establecidos para las Telecomunicaciones, el desarrollo de nuevas tecnologías (Equipos, Sistemas) y las distintas Certificaciones que avalen un método determinado.
Brindar certificaciones y protocolos que permitan identificar y clasificar la Calidad de Servicio para distintos medios de comunicación.
HISTORIA
El término telemática se acuñó en Francia (télématique). En 1976, en un informe encargado por el presidente francés y elaborado por Simón Nora y Alain Min (conocido como informe Nora-Min y distribuido por el título: Informatización de la Sociedad), en el que se daba una visión increíblemente precisa de la evolución tecnológica futura.

Pero al igual que en Francia, en los países anglosajones también existe la disciplina telemática, la cual es denominada como Competer and Comunicativos (del inglés: ‘Ordenador y Comunicaciones’) o Comunicación (concepto acuñado por Wen Gao1 en su artículo Comunicación: Fromm Concept to Practice2 ). No obstante hay matices claves a distinguir entre los dos términos. Para aclarar esto, conviene situarse en el contexto de la época: por una parte Francia, que ponía claro énfasis en las telecomunicaciones como motor de su transformación social en los años 70, mientras que Estados Unidos estaba viviendo una gran revolución de la informática. Así, Comunicación (computadores + comunicación) apunta a un modelo con mayor relevancia de los sistemas informáticos; telemática (télématique) por su parte, refiere a un mayor énfasis en la telecomunicación en sí. En la actualidad, esta diferencia de origen se ha perdido, ya que esta disciplina científica y tecnológica ha convergido por completo a nivel mundial, para formar un único cuerpo de conocimiento bien establecido. Naciendo de esta forma el actual significado de la telemática.
LA ROBOTICA
EL CONCEPTO DE ROBOTICA
Es el conjunto de conocimientos teóricos y prácticos que permiten concebir, realizar y automatizar sistemas basados en estructuras mecánicas poli articuladas, dotados de un determinado grado de "inteligencia" y destinados a la producción industrial oral sustitución del hombre en muy diversas tareas.Un sistema robóticos puede describirse, como "Aquel que es capaz de recibir información, de comprender su entorno a través del empleo de modelos, reformular y de ejecutar planes, y de controlar o supervisar su operación”.
Tres leyes por Isaac Asimov1.
Un robot no puede dañar a un ser humano o, a través de la inacción, permitir que se dañe a un ser humano.2.
Un robot debe obedecer las órdenes dadas por los seres humanos, excepto cuando tales Órdenes estén en contra de la primera ley.3.
Un robot debe proteger su propia existencia siempre y cuando esta protección no entre en conflicto con la primera y segunda ley.
ARQUITECTURAS DE LOS ROBOTS La arquitectura, definida por el tipo de configuración general del robot, puede ser metamórfica.
El concepto de metamorfismo: se ha introducido para incrementar la flexibilidad funcional de un robot a través del cambio de su configuración por el propio robot.
HISTORIA DE LA ROBOTICA
Los primeros Robots construidos, en la tierra, eran modelos poco avanzados. Era una época en donde la Robo psicología no estaba muy bien desarrollada. Estos Robots podían ser enfrentados a situaciones en las cuales se vieran en un conflicto con sus leyes. Una de las situaciones más sencillas se da cuando un Robot debe dañar a un ser humano para evitar que dos o más sufran daño. Aquí los Robots decidían en función de un criterio exclusivamente cuantitativo, quedando luego inutilizados, al verse forzados a violar la primera ley.
Posteriores desarrollos en la Robótica, permitieron la construcción de circuitos más complejos, y por ende, con una mayor capacidad de autorreflexión. Una peculiaridad de los Robots es que pueden llegar a redefinir su concepto de "daño" según sus experiencias e incluso, llegar a determinar niveles de éste. Su valoración de los seres humanos también puede ser determinada por el ambiente.
Estas situaciones nunca se hubieran dado en Robots más antiguos. Asimov plantea en sus historias de Robots las más diversas situaciones, siempre considerando las posibilidades lógicas que podrían llevar a los Robots a tales situaciones.
Uno puede llegar a encariñarse con los Robots de Asimov, él que nos muestra en sus historias Robots cada vez más "humanos". En El hombre bicentenario, Asimov nos narra la historia de Andrew Martín, nacido Robot, y que luego de una vida de lucha, logró morir como un ser humano. Están también R. Daniel Oliva y R. Guisar Revenlo, los cuales tienen un papel fundamental en la segunda expansión de los seres humanos y la posterior fundación del imperio galáctico. Estos dos personajes son importantes en la medida en que, siendo los Robots más complejos jamás creados, fueron capaces de desarrollar la ley cero de la Robótica (Cerote la):
"Un Robot no puede hacer daño a la humanidad o, por inacción, permitir que la humanidad sufra daño."
Se supone que la Ley Cero sería el resultado de la reflexión filosófica por parte de estos Robots más sofisticados.
R Guisar muere luego de tener que dañar a un ser humano en virtud de la ley cero. El problema fundamental de esta ley está en el problema para definir "humanidad", así como para determinar qué "daña" a la humanidad. R. Daniel logró asimilar la ley cero gracias al sacrificio de Guisar, convirtiéndose desde entonces en el protector de la humanidad. Daniel se convierte en uno de los personajes más importantes del ciclo de Trántor (formado por los cuentos y novelas de Robots, las novelas del imperio, y la saga de las fundaciones: 17 libros) siendo además el punto que le da continuidad.
La Robótica abre una nueva y decisiva etapa en el actual proceso de mecanización y automatización creciente de los procesos de producción. Consiste esencialmente en la sustitución de máquinas o sistema s automáticos que realizan operaciones concretas, por dispositivos mecánicos que realizan operaciones concretas, por dispositivos mecánicos de uso general, dotados de varios grados de libertad en sus movimientos y capaces de adaptarse a la automatización de un número muy variado de procesos y operaciones.
La Robótica se ha caracterizado por el desarrollo de sistemas cada vez más flexibles, versátiles y polivalentes, mediante la utilización de nuevas estructuras mecánicas y de nuevos métodos de control y percepción.
La Robótica ha alcanzado un nivel de madurez bastante elevado en los últimos tiempos, y cuenta con un correcto aparato teórico. Sin embargo, algunas cosas que para los humanos son muy sencillas, como andar, correr o coger un objeto sin romperlo, requieren una potencia de cálculo para igualarlas que no está disponible todavía.
Sin embargo se espera que el continuo aumento de la potencia de los ordenadores y las investigaciones en inteligencia artificial, visión artificial y otras ciencias paralelas nos permitan acércanos un poco más cada vez a los milagros soñados por los primeros ingenieros y también a los peligros que nos adelanta la ciencia ficción.
LA PREHISTORIA
La palabra Robot surge con la obra RUR, los "Robots Universales de Rossum" de Carel Capee, es una palabra checoslovaca que significa trabajador, sirviente. Sin embargo podemos encontrar en casi todos los mitos de las diversas culturas una referencia a la posibilidad de crear un ente con inteligencia, desde el Popol-Vuh de nuestros antepasados mayas hasta el Golem del judaísmo.
Desde la época de los griegos se intentó crear dispositivos que tuvieran un movimiento sin fin, que no fuera controlado ni supervisado por personas, en los siglos XVII y XVIII la construcción de autómatas humanoides fabricados con mecanismos de relojería por Jacques de Vaucanson, Pierre Henri-Louis, Jaquet- Droz, como el escribiente, the Draughtsman, el músico Henri Maillar de (1800), Olimpia de la ópera de Offenback de Hoffman, fortalecieron la búsqueda de mecanismos que auxiliaran a los hombres en sus tareas.
Estos autómatas desataron controversias alrededor de la posible inteligencia que pudieran tener estos dispositivos pesadas y en la búsqueda de la posibilidad de crear vida artificialmente. El escribiente hacía mofa de la frase de Descartes de "Pienso luego existo parafraseándola al escribir "Escribo luego existo". Los fraudes surgieron como en el caso del ajedrecista, en el que un muñeco mecánico daba respuesta a jugadas de ajedrez, comprobándose más tarde que era un enano encerrado en la caja del muñeco el que daba las respuestas y movía el muñeco. Todos estos mitos anteceden a la obra Kapoc, en la que se plantea la construcción de Robots para liberar a las personas de la carga pesada de trabajo. Sin embargo, esta ficción y la creada por Asimov, junto con los desarrollos mecánicos de máquinas como el telar de Traillar, motiva a George Debo a crear el origen de los Robots industriales, un manipulador que sería parte de una célula de trabajo.
DESARROLLO HISTÓRICO

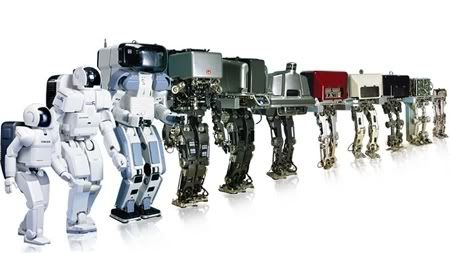
Desde los primeros autómatas hasta las sondas espaciales han pasado varios siglos, pero al hablar de inteligencia sólo podremos mirar unos treinta años atrás. Han sido pocos años, pero muy intensos y el interés que ha despertado en todo el mundo es superior a cualquier previsión que se pudiera formular en su nacimiento y concepción inicial, siguiendo un proceso paralelo a la introducción de las computadoras en las actividades cotidianas de la vida humana, aunque si bien los Robots todavía no han encontrado la forma de inserción en los hogares pero sí son un elemento ya imprescindible en la mayoría de las industrias.
Podemos contemplar la Robótica como una ciencia que, aunque en ella se han conseguido grandes avances, ofrece aun un amplio campo para el desarrollo y la innovación tecnológica y es precisamente este aspecto el que motiva a muchos investigadores y aficionados a los Robots a seguir adelante planteando Robots cada vez más evolucionados y complejos.
Los aficionados a los Robots también juegan un papel muy importante en el desarrollo de la Robótica, ya que son éstos los que, partiendo de una afición firme, con sus particulares ideas y al cabo de un cierto tiempo de pruebas y progresos, han podido desarrollar sus teorías y, con ello, crear precedentes o mejorar aspectos olvidados, así como solucionar problemas no previstos inicialmente.
1: EL MONJE CIBERNÉTICO
El primer autómata digno de mención del que noticias existen, se cree que fue construido por Giovanni Torriani durante la primera mitad del siglo XVI. El invento, que simula la figura de un monje de la época, funcionaba mediante un mecanismo de resorte al que se le daba cuerda con una llave.
El monje era capaz de girar e inclinar la cabeza, mover los ojos de un lado para otro, abrir la boca y golpearse el pecho con la mano derecha mientras subía y bajaba la izquierda.
2: EL PATO QUE EVACUABA 

El pato automático de Jacques Vaucanso, invento mecánico se construyó en 1738 con el propósito venerable de recaudar dinero para su inventor.
El patito, construido en cobre puro y duro, no sólo graznaba, se bañaba y bebía agua sino que comía grano, lo digería y, aún no contento, lo evacuaba.
Tras andar perdido durante treinta y tantos años, un suizo llamado Reich Steiner logró hallarlo y reconstruir sus más de 4000 piezas. Después de su debut en la Sácala de Milán ya en el siglo pasado, el animalito volvió a perderse y hoy en día su paradero es un misterio.
3: LA MUÑECA ESCRIBANA

Fue a principios del siglo pasado cuando un mecánico llamado Maillardet creó un autómata capaz de escribir. La aplicada máquina, de apariencia femenina, podía escribir en inglés y francés y además hasta dibujaba paisajes.
Unos años más tarde la autómata escribana quedó destruida y en 1812 se reconstruyó con una nueva identidad y pasó a ser conocida como "La muñeca de Filadelfia".
4: PRIMERAS APROXIMACIONES

Pero es ya en nuestro siglo cuando los automatismos empiezan a tomarse un poco en serio y a ser utilizados en aplicaciones prácticas.
Como sucede siempre que la necesidad apremia, durante la Segunda Guerra Mundial, los científicos tuvieron que ingeniárselas para poder manejar sin perjuicio los elementos radiactivos.
Se construyeron con este fin los llamados tele operadores que, aún lejos de ser robots, son la primera aproximación conseguida por los ingenieros. Se basaban en dispositivos mecánicos que eran capaces de reproducir las acciones realizadas por un operador situado a distancia. El efecto era como tener brazos y manos muy largas.
algunos años después, los dispositivos mecánicos se sustituyeron por conexiones eléctricas, quedando algo menos ortopédico y más parecido a los robots que conocemos en la actualidad.
5: UNA INDUSTRIA INCIPIENTE

Se puede hablar, sin embargo, de una industria de los robots hasta principios de los años setenta.
Joseph F. Engelberger, fue el primero en reconocer el potencial que encerraban las máquinas automatizadas. El mismo Engelberger confesó que fue la lectura del libro YO ROBOT, de nuestro amigo Asimos, la que llevó a dedicar su vida a la robótica.
Engelberger, que por entonces (los años 50) cursaba estudios en la Universidad de Columbia, coincidió en un cóctel con un inventor también apasionado por los robots. Su nombre era George C. Debo.
El espíritu comercial de Engelberger unido a las patentes de Debo dieron como resultado el inicio de una industria que ni siquiera sus creadores pudieron imaginar hasta dónde iba a llegar.
Juntos fundaron la compañía Animación dedicada a la creación de patentes de máquinas automatizadas. A principios de los años setenta habían diseñado y producido un montón de maquinaria automática de todo tipo.
Pero no tenían resueltos los problemas con las computadoras utilizadas para el control de los robots, por aquel entonces nada manejables y aún demasiado caros. La aparición del microchip acabó con su pesadilla, y a partir de entonces Animación se convirtió en una de las empresas más rentables de todo el mundo. Por ello se otorgaron Engerlberger y Devol los bien merecidos títulos de "padre" y "abuelo" de la Robótica Industrial.
6: EL GRAN BOOM DEL IMPERIO

En 1970 se organiza el primer Simposio Internacional de Robots Industriales, ISIR.
Las asociaciones más importantes de esa época eran: JIRA (Jipan Industrial Robot Asociación), la RIA (Robot Industries Asociación) y la BRA (British Robot Asociación).
Paralelamente, las patentes y los robots seguían proliferando. Se empezaba a hablar de cálculo de trayectorias, sonorización, retroalimentación y sistemas servo dirigidos.
7: ALGUNOS NOMBRES Y FECHAS
 Tras el primer desarrollo de Animación basado en una de las patentes de Devol (denominada "dispositivo de transferencia programada articulada") todo fueron robots por aquí y por allá.
Tras el primer desarrollo de Animación basado en una de las patentes de Devol (denominada "dispositivo de transferencia programada articulada") todo fueron robots por aquí y por allá. En 1962, H.A. Ernst publicó el desarrollo de una mano mecánica controlada por una computadora. La MH-1 era capaz de "sentir" bloques y apilarlos sin la ayuda de ningún operario. Por la misma fecha, Tomo Vic y Beni diseñaron otra mano capaz de detectar el tamaño y peso de un objeto.
Como diseñar manos parecía poco, al año siguiente se lanzó al mercado el primer prototipo comercial de bazo articulado. Lo creó la American Machina y Country Company, y se llamó VESATRAN.
Algunos años después, en 1968, el Laboratorio de Inteligencia Artificial de Stanford decide poner a una computadora ojos y oídos (cámaras y micrófonos) y añadir algo de inteligencia aunque fuese artificial. Los ingenieros de robots ven en este avance la posibilidad de sacar a sus máquinas de la oscuridad y el silencio y no se lo piensan dos veces.
La compañía Kawasaki Heavy Industries negocia una licencia con Animación y en 1970 desarrollan el primero robot articulado provisto de una cámara y controlado por una computadora. Lo llamaron el brazo Stanford y era capaz de apilar bloques según una estrategia trazada y de forma inteligente.
El éxito obtenido por este proyecto llevó a considerar el control por la computadora y la sonorización como partes fundamentales de un sistema robotizado, y cualquier robot que se preciase, debía incluir ambos.
A partir de la segunda mitad de los setenta todo evolucionó mucho más deprime. Ingenieros de la IBM desarrollaron en 1975 un manipulador inteligente con sensores de contacto y fuerza. En el MIT (Instituto Tecnológico de Massachusetts) se trabajaba en aspectos de inteligencia artificial. Y el Jet Propulsión Laboratorio desarrollaba técnicas de control sobre el brazo Stanford para proyectos espaciales.
8: CARACTERISTICAS DE LA ROBOTICA

La robótica es la ciencia encaminada a diseñar y construir aparatos y sistemas capaces de realizar tareas propias de un ser humano."
Existen diversos tipos de robóticas y sus características son las siguientes
Robótica Industrial: Es la parte de la Ingeniería que se dedica a la construcción de máquinas capaces de realizar tareas mecánicas y repetitivas de una manera muy eficiente y con costes reducidos.
 9: ROBOTS FISICOS
9: ROBOTS FISICOSRobótica de Servicio: Es la parte de la Ingeniería que se centra en el diseño y construcción de máquinas capaces de proporcionar servicios directamente a los miembros que forman sociedad.
Robótica Inteligente: Son robots capaces de desarrollar tareas que, desarrolladas en un ser humano, requieren el uso de su capacidad de razonamiento.
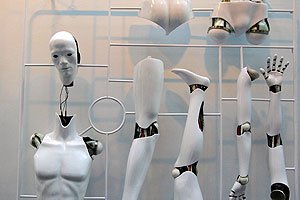
Robótica Humanoide: Es la parte de la ingeniería que se dedica al desarrollo de sistemas robotizados para imitar determinadas peculiaridades del ser humano.
10: ROBOTS SOFTWARE

Robótica de Exploración: Es la parte de la Ingeniería del Software que se encarga de desarrollar programas capaces de explorar documentos en busca de determinados contenidos. Existen diversos servicios en Internet dedicados a esta parcela de la robótica.
11: CARACTERISTICAS
Concurrencia.- Esta característica de los sistemas distribuidos permite que los recursos disponibles en la red puedan ser utilizados simultáneamente por los usuarios y/o agentes que interactúan en la red.
Carencia de reloj global.- Las coordinaciones para la transferencia de mensajes entre los diferentes componentes para la realización de una tarea, no tienen una temporización general, está más bien distribuida a los componentes.
Fallos independientes de los componentes.- Cada componente del sistema puede fallar independientemente, con lo cual los demás pueden continuar ejecutando sus acciones. Esto permite el logro de las tareas con mayor efectividad, pues el sistema en su conjunto continua trabajando.
12: EVOLUCION

Procesamiento central (Host).- Uno de los primeros modelos de ordenadores interconectados, llamados centralizados, donde todo el procesamiento de la organización se llevaba a cabo en una sola computadora, normalmente un Mainframe, y los usuarios empleaban sencillos ordenadores personales.
Los problemas de este modelo son:
Cuando la carga de procesamiento aumentaba se tenía que cambiar el hardware del Mainframe, lo cual es más costoso que añadir más computadores personales clientes o servidores que aumenten las capacidades
El otro problema que surgió son las modernas interfaces gráficas de usuario, las cuales podían conllevar a un gran aumento de tráfico en los medios de comunicación y por consiguiente podían colapsar.
13: GRUPO DE SERVIDORES
 Otro modelo que entró a competir con el anterior, también un tanto centralizado, son un grupo de ordenadores actuando como servidores, normalmente de archivos o de impresión, poco inteligentes para un número de Minicomputadores que hacen el procesamiento conectados a una red de área local.
Otro modelo que entró a competir con el anterior, también un tanto centralizado, son un grupo de ordenadores actuando como servidores, normalmente de archivos o de impresión, poco inteligentes para un número de Minicomputadores que hacen el procesamiento conectados a una red de área local.Los problemas de este modelo son:
Podría generarse una saturación de los medios de comunicación entre los servidores poco inteligentes y los minicomputadores, por ejemplo cuando se solicitan archivos grades por varios clientes a la vez, podían disminuir en gran medida la velocidad de transmisión de información.
La Computación Cliente Servidor.- Este modelo, que predomina en la actualidad, permite descentralizar el procesamiento y recursos, sobre todo, de cada uno de los servicios y de la visualización de la Interfaz Gráfica de Usuario. Esto hace que ciertos servidores estén dedicados solo a una aplicación determinada y por lo tanto ejecutarla en forma eficiente.
AUTORES:
WILSON PUERTA SANTILLAN
JOEL CHOTA REYNA
ROBERT SOLANO NEIRA
JANY TUANAMA SATALAYA
ROSA HERNANDEZ CORREA
JOEL CHOTA REYNA
ROBERT SOLANO NEIRA
JANY TUANAMA SATALAYA
ROSA HERNANDEZ CORREA

END OF AN EMPIRE